Tasks
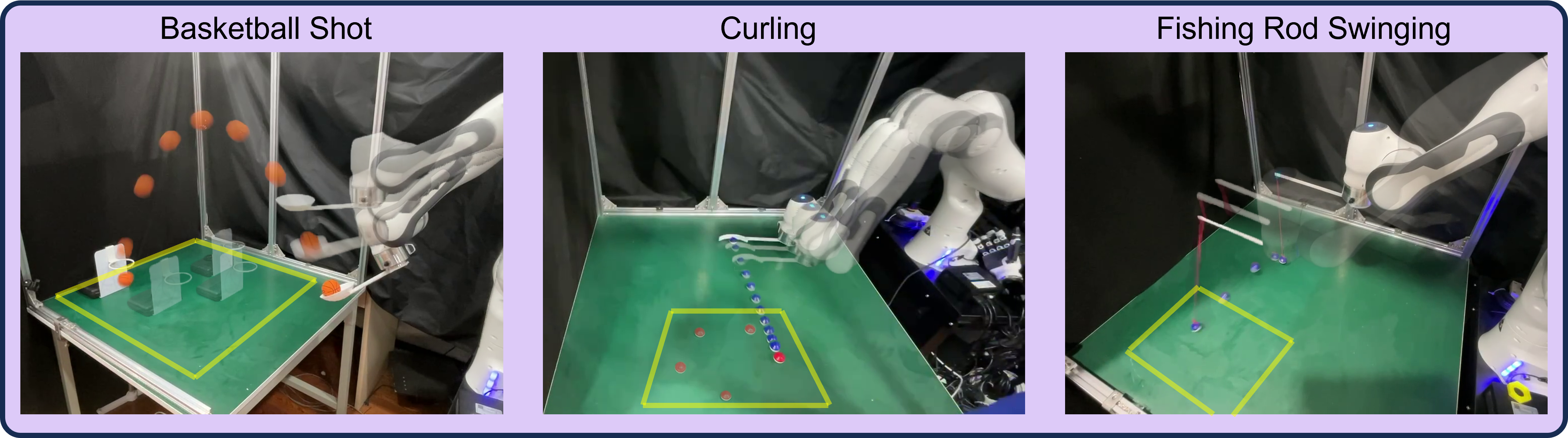
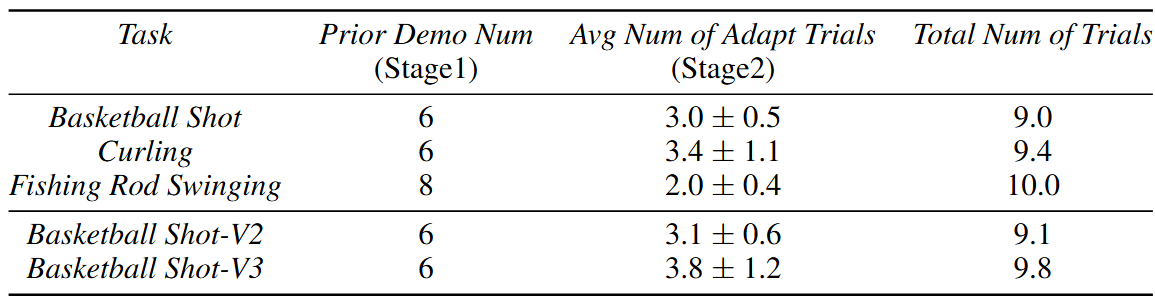
We select three real-world goal-conditioned agile dynamic tasks: Basketball Shot, Curling and Fishing Rod Swinging, aiming to cover several typical agile dynamic behaviors that are commonly seen in daily life, including projectile motion, sliding with friction, and movement of soft deformable objects.